The goals / steps of this project are the following:
- Perform a Histogram of Oriented Gradients (HOG) feature extraction on a labeled training set of images and train a classifier Linear SVM classifier
- We apply a color transform and append binned color features, as well as histograms of color, to your HOG feature vector.
- We normalize features and randomize a selection for training and testing.
- Implement a sliding-window technique and use your trained classifier to search for vehicles in images.
- Run your pipeline on a video stream (start with the test_video.mp4 and later implement on full project_video.mp4) and create a heat map of recurring detections frame by frame to reject outliers and follow detected vehicles.
- Estimate a bounding box for vehicles detected.
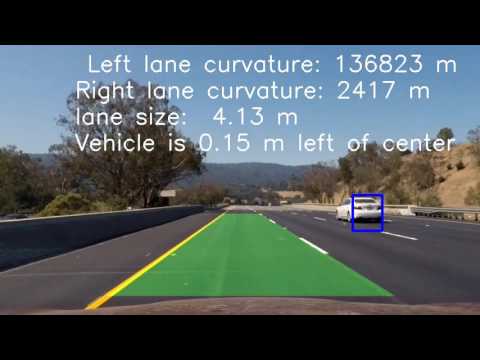
Click the image below to view the final project video with advanced lane detection and car detection or download project videos from the repository.
We first read the images of vehicles and non-vehicles into two arrays (cars and not_cars).
import numpy as np
import cv2
import matplotlib.image as mpimg
import glob
import matplotlib.pyplot as plt
%matplotlib inline
# Make a list of car images
images = glob.glob('./vehicles/*/*.png')
print('The number of vehicle images:', len(images))
cars = []
# load images into cars array
for fname in images:
img = mpimg.imread(fname)
cars.append(img)
nc_images = glob.glob('./non-vehicles/*/*.png')
print('The number of non-vehicle images:', len(nc_images))
not_cars = []
# load non-vehicle images into not_cars array
for fname in nc_images:
img = mpimg.imread(fname)
not_cars.append(img)
The number of vehicle images: 8792
The number of non-vehicle images: 8968
Here we show five random images of cars and not cars:
import random
# let's preview a couple for images from datasets
for i in range(5):
car = random.choice(cars)
not_car = random.choice(not_cars)
f, (ax1, ax2) = plt.subplots(1, 2, figsize=(24, 9))
f.tight_layout()
ax1.imshow(car)
ax1.set_title('Car', fontsize=30)
ax2.imshow(not_car)
ax2.set_title('Not a Car', fontsize=30)
plt.subplots_adjust(left=0., right=1, top=0.9, bottom=0.)




We how visualize five car images and their corresponding hog features:
# let's calculate hog features
import numpy as np
from skimage.feature import hog
# Define a function to return HOG features and visualization
def get_hog_features(img, orient, pix_per_cell, cell_per_block, vis=False, feature_vec=True):
if vis == True:
# Use skimage.hog() to get both features and a visualization
features, hog_image = hog(img, orientations=orient, pixels_per_cell=(pix_per_cell, pix_per_cell), cells_per_block=(cell_per_block, cell_per_block), visualise=vis, feature_vector=feature_vec)
return features, hog_image
else:
# Use skimage.hog() to get features only
features = hog(img, orientations=orient, pixels_per_cell=(pix_per_cell, pix_per_cell), cells_per_block=(cell_per_block, cell_per_block), visualise=vis, feature_vector=feature_vec)
return features
for i in range(5):
# Generate a random index to look at a car image
ind = np.random.randint(0, len(cars))
# Read in the image
image = cars[ind]
gray = cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)
# Define HOG parameters
orient = 11
pix_per_cell = 8
cell_per_block = 2
# Call our function with vis=True to see an image output
features, hog_image = get_hog_features(gray, orient,
pix_per_cell, cell_per_block,
vis=True, feature_vec=False)
# Plot the examples
fig = plt.figure(figsize=(24, 9))
plt.subplot(121)
plt.imshow(image, cmap='gray')
plt.title('Example Car Image', fontsize=30)
plt.subplot(122)
plt.imshow(hog_image, cmap='gray')
plt.title('HOG Visualization', fontsize=30)




We now introduce functions for creating spatial and color histogram features and combine them with hog features for an extract_features function
from sklearn.preprocessing import StandardScaler
# Define a function to compute binned color features
def bin_spatial(img, size=(32, 32)):
# Use cv2.resize().ravel() to create the feature vector
features = cv2.resize(img, size).ravel()
# Return the feature vector
return features
# Define a function to compute color histogram features
def color_hist(img, nbins=32, bins_range=(0, 256)):
# Compute the histogram of the color channels separately
channel1_hist = np.histogram(img[:,:,0], bins=nbins, range=bins_range)
channel2_hist = np.histogram(img[:,:,1], bins=nbins, range=bins_range)
channel3_hist = np.histogram(img[:,:,2], bins=nbins, range=bins_range)
# Concatenate the histograms into a single feature vector
hist_features = np.concatenate((channel1_hist[0], channel2_hist[0], channel3_hist[0]))
# Return the individual histograms, bin_centers and feature vector
return hist_features
def extract_features(imgs, color_space='RGB', spatial_size=(32, 32),
hist_bins=32, orient=9,
pix_per_cell=8, cell_per_block=2, hog_channel=0,
spatial_feat=True, hist_feat=True, hog_feat=True):
# Create a list to append feature vectors to
features = []
# Iterate through the list of images
for image in imgs:
file_features = []
# apply color conversion if other than 'RGB'
if color_space != 'RGB':
if color_space == 'HSV':
feature_image = cv2.cvtColor(image, cv2.COLOR_RGB2HSV)
elif color_space == 'LUV':
feature_image = cv2.cvtColor(image, cv2.COLOR_RGB2LUV)
elif color_space == 'HLS':
feature_image = cv2.cvtColor(image, cv2.COLOR_RGB2HLS)
elif color_space == 'YUV':
feature_image = cv2.cvtColor(image, cv2.COLOR_RGB2YUV)
elif color_space == 'YCrCb':
feature_image = cv2.cvtColor(image, cv2.COLOR_RGB2YCrCb)
else: feature_image = np.copy(image)
if spatial_feat == True:
spatial_features = bin_spatial(feature_image, size=spatial_size)
file_features.append(spatial_features)
if hist_feat == True:
# Apply color_hist()
hist_features = color_hist(feature_image, nbins=hist_bins)
file_features.append(hist_features)
if hog_feat == True:
# Call get_hog_features() with vis=False, feature_vec=True
if hog_channel == 'ALL':
hog_features = []
for channel in range(feature_image.shape[2]):
hog_features.append(get_hog_features(feature_image[:,:,channel],
orient, pix_per_cell, cell_per_block,
vis=False, feature_vec=True))
hog_features = np.ravel(hog_features)
else:
hog_features = get_hog_features(feature_image[:,:,hog_channel], orient,
pix_per_cell, cell_per_block, vis=False, feature_vec=True)
# Append the new feature vector to the features list
file_features.append(hog_features)
features.append(np.concatenate(file_features))
# Return list of feature vectors
return featuresNext we apply feature extraction to array of vehicle images cars and array non-vehicle images not_cars. We use color space YCrCb, 11 HOG orientations, 8 HOG pixels per cell, 2 HOG cells per block and use all the channels of the image to extract HOG features. For spatial features we use 32 by 32 binning dimentions and for color histogram features we use 32 histogram bins. This results in 9636 features. We use Linear Support Vector Classifier to create a classifier with 99.01% accuracy on a test set (20% of our image data).
import time
from sklearn.svm import LinearSVC
from sklearn.model_selection import train_test_split
color_space = 'YCrCb' # Can be RGB, HSV, LUV, HLS, YUV, YCrCb
orient = 11 # HOG orientations
pix_per_cell = 8 # HOG pixels per cell
cell_per_block = 2 # HOG cells per block
hog_channel = 'ALL' # Can be 0, 1, 2, or "ALL"
spatial_size = (32, 32) # Spatial binning dimensions
hist_bins = 32 # Number of histogram bins
spatial_feat = True # Spatial features on or off
hist_feat = True # Histogram features on or off
hog_feat = True # HOG features on or off
car_features = extract_features(cars, color_space=color_space,
spatial_size=spatial_size, hist_bins=hist_bins,
orient=orient, pix_per_cell=pix_per_cell,
cell_per_block=cell_per_block,
hog_channel=hog_channel, spatial_feat=spatial_feat,
hist_feat=hist_feat, hog_feat=hog_feat)
notcar_features = extract_features(not_cars, color_space=color_space,
spatial_size=spatial_size, hist_bins=hist_bins,
orient=orient, pix_per_cell=pix_per_cell,
cell_per_block=cell_per_block,
hog_channel=hog_channel, spatial_feat=spatial_feat,
hist_feat=hist_feat, hog_feat=hog_feat)
X = np.vstack((car_features, notcar_features)).astype(np.float64)
# Fit a per-column scaler
X_scaler = StandardScaler().fit(X)
# Apply the scaler to X
scaled_X = X_scaler.transform(X)
# Define the labels vector
y = np.hstack((np.ones(len(car_features)), np.zeros(len(notcar_features))))
# Split up data into randomized training and test sets
rand_state = np.random.randint(0, 100)
X_train, X_test, y_train, y_test = train_test_split(
scaled_X, y, test_size=0.2, random_state=rand_state)
print('Using:',orient,'orientations',pix_per_cell,
'pixels per cell and', cell_per_block,'cells per block')
print('Feature vector length:', len(X_train[0]))
# Use a linear SVC
svc = LinearSVC()
# Check the training time for the SVC
t=time.time()
svc.fit(X_train, y_train)
t2 = time.time()
print(round(t2-t, 2), 'Seconds to train SVC...')
# Check the score of the SVC
print('Test Accuracy of SVC = ', round(svc.score(X_test, y_test), 4))
# Check the prediction time for a single sample
t=time.time()Using: 11 orientations 8 pixels per cell and 2 cells per block
Feature vector length: 9636
8.79 Seconds to train SVC...
Test Accuracy of SVC = 0.9901
Initially, we are going to apply our vehicle detection pipeline to the following set of six test images:
test_images = glob.glob('./test_images/*.jpg')
test_imgs = []
for test_image in test_images:
img = mpimg.imread(test_image)
test_imgs.append(img)
fig = plt.figure()
plt.imshow(img)





We use the following find_cars function, which, instead of doing a sliding window technique, runs the HOG feature extraction on the whole image (actually a subset delineated by ystart, ystop parameters).
def convert_color(img, conv='RGB2YCrCb'):
if conv == 'RGB2YCrCb':
return cv2.cvtColor(img, cv2.COLOR_RGB2YCrCb)
if conv == 'BGR2YCrCb':
return cv2.cvtColor(img, cv2.COLOR_BGR2YCrCb)
if conv == 'RGB2LUV':
return cv2.cvtColor(img, cv2.COLOR_RGB2LUV)
# Define a single function that can extract features using hog sub-sampling and make predictions
def find_cars(img, ystart, ystop, scale, svc, X_scaler, orient, pix_per_cell, cell_per_block, spatial_size, hist_bins):
# make a copy of the image
draw_img = np.copy(img)
# scale the image to [0,1]
img = img.astype(np.float32)/255
# restrict the image search area
img_tosearch = img[ystart:ystop,:,:]
# convert the image search area to YCrCb
ctrans_tosearch = convert_color(img_tosearch, conv='RGB2YCrCb')
# if scale is not 1 shrink the search area by scale
if scale != 1:
imshape = ctrans_tosearch.shape
ctrans_tosearch = cv2.resize(ctrans_tosearch, (np.int(imshape[1]/scale), np.int(imshape[0]/scale)))
# split the search area into channels
ch1 = ctrans_tosearch[:,:,0]
ch2 = ctrans_tosearch[:,:,1]
ch3 = ctrans_tosearch[:,:,2]
# Define blocks and steps as above
nxblocks = (ch1.shape[1] // pix_per_cell)-1
nyblocks = (ch1.shape[0] // pix_per_cell)-1
nfeat_per_block = orient*cell_per_block**2
# 64 was the orginal sampling rate, with 8 cells and 8 pix per cell
window = 64
nblocks_per_window = (window // pix_per_cell)-1
cells_per_step = 2 # Instead of overlap, define how many cells to step
nxsteps = (nxblocks - nblocks_per_window) // cells_per_step
nysteps = (nyblocks - nblocks_per_window) // cells_per_step
# Compute individual channel HOG features for the entire image
hog1 = get_hog_features(ch1, orient, pix_per_cell, cell_per_block, feature_vec=False)
hog2 = get_hog_features(ch2, orient, pix_per_cell, cell_per_block, feature_vec=False)
hog3 = get_hog_features(ch3, orient, pix_per_cell, cell_per_block, feature_vec=False)
for xb in range(nxsteps):
for yb in range(nysteps):
ypos = yb*cells_per_step
xpos = xb*cells_per_step
# Extract HOG for this patch
hog_feat1 = hog1[ypos:ypos+nblocks_per_window, xpos:xpos+nblocks_per_window].ravel()
hog_feat2 = hog2[ypos:ypos+nblocks_per_window, xpos:xpos+nblocks_per_window].ravel()
hog_feat3 = hog3[ypos:ypos+nblocks_per_window, xpos:xpos+nblocks_per_window].ravel()
hog_features = np.hstack((hog_feat1, hog_feat2, hog_feat3))
xleft = xpos*pix_per_cell
ytop = ypos*pix_per_cell
# Extract the image patch
subimg = cv2.resize(ctrans_tosearch[ytop:ytop+window, xleft:xleft+window], (64,64))
# Get color features
spatial_features = bin_spatial(subimg, size=spatial_size)
hist_features = color_hist(subimg, nbins=hist_bins)
# Scale features and make a prediction
test_features = X_scaler.transform(np.hstack((spatial_features, hist_features, hog_features)).reshape(1, -1))
#test_features = X_scaler.transform(np.hstack((shape_feat, hist_feat)).reshape(1, -1))
test_prediction = svc.predict(test_features)
if test_prediction == 1:
xbox_left = np.int(xleft*scale)
ytop_draw = np.int(ytop*scale)
win_draw = np.int(window*scale)
cv2.rectangle(draw_img,(xbox_left, ytop_draw+ystart),(xbox_left+win_draw,ytop_draw+win_draw+ystart),(0,0,255),6)
return draw_imgWe set ystart and ystop parameters in such a way as to exclude the sky and the trees and the hood of the car from our search. We try searching first with a scale parameter of 1.75.
ystart = 400
ystop = 656
scale = 1.75
for img in test_imgs:
out_img = find_cars(img, ystart, ystop, scale, svc, X_scaler, orient, pix_per_cell, cell_per_block, spatial_size, hist_bins)
fig = plt.figure()
plt.imshow(out_img)





We notice that the car on the 5th image is not found at scale 1.75. In the following sample we reduce the scale to 1.25 and try again. We now notice that we found the car.
scale = 1.25
for img in test_imgs:
out_img = find_cars(img, ystart, ystop, scale, svc, X_scaler, orient, pix_per_cell, cell_per_block, spatial_size, hist_bins)
fig = plt.figure()
plt.imshow(out_img)





For our final pipeline we are going to search for the car at four different scales (1.25, 1.5, 1.75, and 2.0). We combine all the boxes using a heatmap technique and set a threshold of 2 for a final bounding box. The results are shown in a set of images below. Even though on the fourth image we see a ghost bounding box, which could be removed by setting the threshold higher, we found that on the actual videos the performance of our pipeline is better with threshold left at 2.
from scipy.ndimage.measurements import label
def add_heat(heatmap, bbox_list):
# Iterate through list of bboxes
for box in bbox_list:
# Add += 1 for all pixels inside each bbox
# Assuming each "box" takes the form ((x1, y1), (x2, y2))
heatmap[box[0][1]:box[1][1], box[0][0]:box[1][0]] += 1
# Return updated heatmap
return heatmap# Iterate through list of bboxes
def apply_threshold(heatmap, threshold):
# Zero out pixels below the threshold
heatmap[heatmap <= threshold] = 0
# Return thresholded map
return heatmap
def draw_labeled_bboxes(img, labels):
# Iterate through all detected cars
for car_number in range(1, labels[1]+1):
# Find pixels with each car_number label value
nonzero = (labels[0] == car_number).nonzero()
# Identify x and y values of those pixels
nonzeroy = np.array(nonzero[0])
nonzerox = np.array(nonzero[1])
# Define a bounding box based on min/max x and y
bbox = ((np.min(nonzerox), np.min(nonzeroy)), (np.max(nonzerox), np.max(nonzeroy)))
# Draw the box on the image
cv2.rectangle(img, bbox[0], bbox[1], (0,0,255), 6)
# Return the image
return img
scales = [1.25, 1.5, 1.75, 2.0]
# Define a single function that can extract features using hog sub-sampling and make predictions
def find_car_boxes(img, ystart, ystop, scale, svc, X_scaler, orient, pix_per_cell, cell_per_block, spatial_size, hist_bins):
bbox_list = []
# make a copy of the image
draw_img = np.copy(img)
# scale the image to [0,1]
img = img.astype(np.float32)/255
# restrict the image search area
img_tosearch = img[ystart:ystop,:,:]
# convert the image search area to YCrCb
ctrans_tosearch = convert_color(img_tosearch, conv='RGB2YCrCb')
# if scale is not 1 shrink the search area by scale
if scale != 1:
imshape = ctrans_tosearch.shape
ctrans_tosearch = cv2.resize(ctrans_tosearch, (np.int(imshape[1]/scale), np.int(imshape[0]/scale)))
# split the search area into channels
ch1 = ctrans_tosearch[:,:,0]
ch2 = ctrans_tosearch[:,:,1]
ch3 = ctrans_tosearch[:,:,2]
# Define blocks and steps as above
nxblocks = (ch1.shape[1] // pix_per_cell)-1
nyblocks = (ch1.shape[0] // pix_per_cell)-1
nfeat_per_block = orient*cell_per_block**2
# 64 was the orginal sampling rate, with 8 cells and 8 pix per cell
window = 64
nblocks_per_window = (window // pix_per_cell)-1
cells_per_step = 2 # Instead of overlap, define how many cells to step
nxsteps = (nxblocks - nblocks_per_window) // cells_per_step
nysteps = (nyblocks - nblocks_per_window) // cells_per_step
# Compute individual channel HOG features for the entire image
hog1 = get_hog_features(ch1, orient, pix_per_cell, cell_per_block, feature_vec=False)
hog2 = get_hog_features(ch2, orient, pix_per_cell, cell_per_block, feature_vec=False)
hog3 = get_hog_features(ch3, orient, pix_per_cell, cell_per_block, feature_vec=False)
for xb in range(nxsteps):
for yb in range(nysteps):
ypos = yb*cells_per_step
xpos = xb*cells_per_step
# Extract HOG for this patch
hog_feat1 = hog1[ypos:ypos+nblocks_per_window, xpos:xpos+nblocks_per_window].ravel()
hog_feat2 = hog2[ypos:ypos+nblocks_per_window, xpos:xpos+nblocks_per_window].ravel()
hog_feat3 = hog3[ypos:ypos+nblocks_per_window, xpos:xpos+nblocks_per_window].ravel()
hog_features = np.hstack((hog_feat1, hog_feat2, hog_feat3))
xleft = xpos*pix_per_cell
ytop = ypos*pix_per_cell
# Extract the image patch
subimg = cv2.resize(ctrans_tosearch[ytop:ytop+window, xleft:xleft+window], (64,64))
# Get color features
spatial_features = bin_spatial(subimg, size=spatial_size)
hist_features = color_hist(subimg, nbins=hist_bins)
# Scale features and make a prediction
test_features = X_scaler.transform(np.hstack((spatial_features, hist_features, hog_features)).reshape(1, -1))
#test_features = X_scaler.transform(np.hstack((shape_feat, hist_feat)).reshape(1, -1))
test_prediction = svc.predict(test_features)
if test_prediction == 1:
xbox_left = np.int(xleft*scale)
ytop_draw = np.int(ytop*scale)
win_draw = np.int(window*scale)
bbox_list.append(((xbox_left, ytop_draw+ystart),(xbox_left+win_draw,ytop_draw+win_draw+ystart)))
return bbox_list
for img in test_imgs:
full_box_list = []
for scale in scales:
box_list = find_car_boxes(img, ystart, ystop, scale, svc, X_scaler, orient, pix_per_cell, cell_per_block, spatial_size, hist_bins)
full_box_list.extend(box_list)
heat = np.zeros_like(img[:,:,0]).astype(np.float)
# Add heat to each box in box list
heat = add_heat(heat,full_box_list)
# Apply threshold to help remove false positives
heat = apply_threshold(heat,2)
# Visualize the heatmap when displaying
heatmap = np.clip(heat, 0, 255)
# Find final boxes from heatmap using label function
labels = label(heatmap)
draw_img = draw_labeled_bboxes(np.copy(img), labels)
fig = plt.figure(figsize=(24, 9))
plt.subplot(121)
plt.imshow(draw_img)
plt.title('Car Positions', fontsize=30)
plt.subplot(122)
plt.imshow(heatmap, cmap='hot')
plt.title('Heat Map', fontsize=30)
fig.tight_layout()





We first apply our pipeline to a short test video.
from moviepy.editor import VideoFileClip
def process_image(img):
full_box_list = []
for scale in scales:
box_list = find_car_boxes(img, ystart, ystop, scale, svc, X_scaler, orient, pix_per_cell, cell_per_block, spatial_size, hist_bins)
full_box_list.extend(box_list)
heat = np.zeros_like(img[:,:,0]).astype(np.float)
# Add heat to each box in box list
heat = add_heat(heat,full_box_list)
# Apply threshold to help remove false positives
heat = apply_threshold(heat,2)
# Visualize the heatmap when displaying
heatmap = np.clip(heat, 0, 255)
# Find final boxes from heatmap using label function
labels = label(heatmap)
draw_img = draw_labeled_bboxes(np.copy(img), labels)
return draw_img
white_output = './test_video_final_result.mp4'
clip1 = VideoFileClip("./test_video.mp4")
white_clip = clip1.fl_image(process_image) #NOTE: this function expects color images!!
%time white_clip.write_videofile(white_output, audio=False)[MoviePy] >>>> Building video ./test_video_final_result.mp4
[MoviePy] Writing video ./test_video_final_result.mp4
97%|█████████▋| 38/39 [00:50<00:01, 1.35s/it]
[MoviePy] Done.
[MoviePy] >>>> Video ready: ./test_video_final_result.mp4
CPU times: user 50.5 s, sys: 760 ms, total: 51.2 s
Wall time: 52.5 s
And them to a final project video as well as the final result video from the project 4.
white_output = './project_video_final_result.mp4'
clip1 = VideoFileClip("./project_video.mp4")
white_clip = clip1.fl_image(process_image) #NOTE: this function expects color images!!
%time white_clip.write_videofile(white_output, audio=False)[MoviePy] >>>> Building video ./project_video_final_result.mp4
[MoviePy] Writing video ./project_video_final_result.mp4
100%|█████████▉| 1260/1261 [25:39<00:01, 1.33s/it]
[MoviePy] Done.
[MoviePy] >>>> Video ready: ./project_video_final_result.mp4
CPU times: user 25min 31s, sys: 15.9 s, total: 25min 47s
Wall time: 25min 40s
white_output = './project_video_lanes_final_result.mp4'
clip1 = VideoFileClip("./project_video_lanes.mp4")
white_clip = clip1.fl_image(process_image) #NOTE: this function expects color images!!
%time white_clip.write_videofile(white_output, audio=False)[MoviePy] >>>> Building video ./project_video_lanes_final_result.mp4
[MoviePy] Writing video ./project_video_lanes_final_result.mp4
100%|█████████▉| 1260/1261 [25:25<00:01, 1.13s/it]
[MoviePy] Done.
[MoviePy] >>>> Video ready: ./project_video_lanes_final_result.mp4
CPU times: user 25min 20s, sys: 13.9 s, total: 25min 34s
Wall time: 25min 26s
Overall there were relatively few problems with this project. There were several points of optimization: selecting the good parameters for the HOG feature extractor, selecting the right color space, spatial and histogram bin size. Also the number of scales at which to search for cars and the numeric values for these scales were also a subject to tuning. The last parameter to tune was the number of bounding box intersections. The major issue was the amound of time it took to apply the pipeline to a full final video, which took anywhere from 25 to 40 minutes depending mostly on the settings for the HOG extractor. We found that with the current settings it was not necessary to do filtering for false positives among multiple subsequent frames.
From scouting other solutions, looks like YOLO and YOLO9000 follow up algorithm far exceed the pipeline described here in performance and quality of identification and probably would be preferable for real-time real-life applications.
To improve on a pipeline described here, it maybe a good idea to add images from GTI and KITI and Udacity datasets to improve the accuracy of identification.