![]()

Right image : artistic view.
This project was previously licensed under CC BY-NC-SA 4.0. It is now released under the Apache License 2.0.
This project is STRICTLY and EXCLUSIVELY an educational and informational resource. It is NOT intended for, nor suitable for, ANY real-world application, including but not limited to rocket launches, flight operations, aerospace engineering, or any related practical use. The materials (including but not limited to code, designs, and documentation) are provided AS IS and must not be applied, implemented, or adapted in any form outside of a controlled, educational setting.
The Hermetis system is a conceptual tool for learning purposes ONLY. IT IS UNSAFE, UNTESTED, AND UNSUITABLE FOR ANY REAL-WORLD USAGE. Attempting to use or adapt this project for real-world aerospace or engineering purposes could result in:
- CATASTROPHIC FAILURES,
- SERIOUS INJURIES,
- ENVIRONMENTAL DAMAGE,
- or LOSS OF LIFE.
By interacting with, accessing, or referencing this project, you explicitly agree and acknowledge that:
- Hermetis is purely an educational experiment and must NEVER be used for any operational or practical purpose.
- You understand and accept ALL associated risks, including those arising from misuse, misinterpretation, or improper application of the project materials.
Liability Waiver:
The creators, contributors, and any associated parties DISCLAIM ALL RESPONSIBILITY AND LIABILITY for:
- Any harm, damage, or adverse outcomes arising directly or indirectly from your use of this project.
- Any misapplication or adaptation of the materials provided.
You assume FULL and EXCLUSIVE responsibility for any consequences of attempting to use, modify, or deploy this project in any context outside its stated educational purpose. If you choose to do so, it is entirely at YOUR OWN RISK, and YOU AGREE TO WAIVE ALL CLAIMS AGAINST THE PROJECT AUTHORS, CONTRIBUTORS, OR AFFILIATES.
- Overview
- Name Origin
- Hardware Overview
- System Architecture
- System Specifications
- How It Works
- Future Improvements
- License
- Acknowledgement

Bearing in mind that this project was made for learning purposes and probably contains a huge number of errors, Hermetis is an embedded control system designed to theoretically manage rocket launches and navigation. This project is written in assembly. It integrates sensor readings, PID control loops, actuator management, and safety protocols to ensure a smooth and safe rocket flight. The system is responsible for monitoring the rocket's altitude, velocity, and motor status, as well as implementing real-time adjustments to maintain desired parameters throughout the flight.
The system can handle critical events like sensor malfunctions, control system instability, and energy conservation via low-power modes, making it reliable for high-stakes launch operations.

- Autonomous Launch Control: Automated control of the launch sequence including engine activation, thrust adjustments, and stabilization.
- PID Control Systems: For precise altitude and velocity adjustments during flight.
- Real-Time Monitoring: Continuous monitoring of key parameters (altitude, velocity, motor status) using sensor feedback.
- Error Detection and Alerts: Continuous checks for system anomalies, such as sensor faults or motor failures, with automatic alert generation.
- Energy Optimization: Real-time tracking of power consumption with a low-power mode for idle states.
- Sensor Integration: Includes altitude and velocity sensors, with ADC handling for analog signal conversion.
- Safety Protocols: Triggered in case of out-of-range values or system failures (e.g., motor malfunctions, sensor errors).
- Real-Time Interrupt Management: Uses timers and interrupts for precise control, ensuring timely system responses.
The name Hermetis is derived from Hermes, the Greek god associated with speed, communication, and boundary crossing. Hermes was often depicted as a messenger who could travel between realms, symbolizing the rocket’s journey through different atmospheres and boundaries—from Earth to space. The name reflects the project’s core attributes: precision, speed, and reliable control over its flight path.
- Architecture: ARM Cortex-M based microcontroller
- Clock Frequency: Typically 72 MHz (for STM32F4 series)
- Peripheral Support: ADC, GPIO, Timers, Interrupts, UART (for communication)

- Altitude Sensor: A high-precision barometric sensor (e.g., MS5611) with a resolution of up to 0.01m.
- Range: 0 to 10000 meters
- Accuracy: ±1m (at sea level)
- Interface: I2C or SPI
- Velocity Sensor: A velocity sensor (e.g., GPS module with Doppler shift or accelerometer) with integration for velocity measurement.
- Range: 0 to 2000 m/s
- Accuracy: ±0.5 m/s

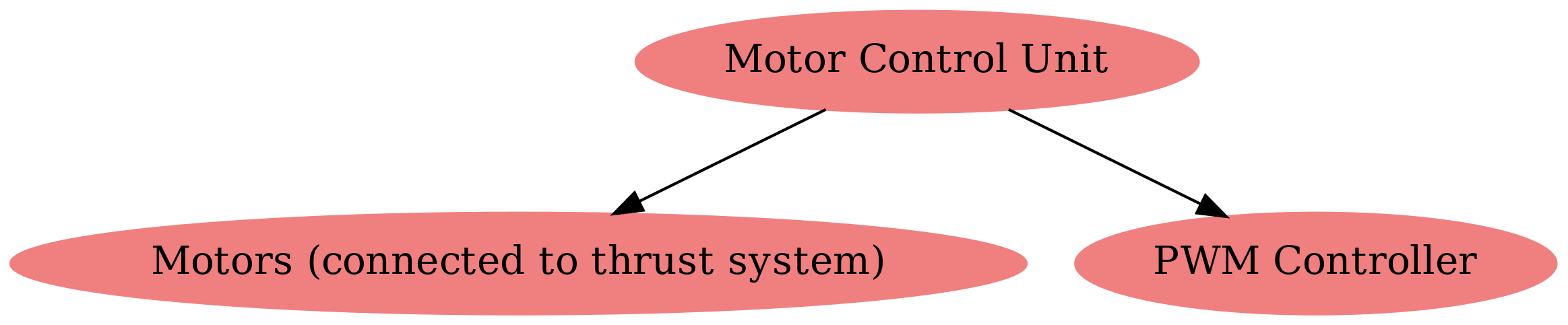
- Main Engine Motors: Controlled through PWM (Pulse Width Modulation) signals for precise thrust control.
- Motor Power: 0 to 255 (8-bit resolution)
- Control: GPIO for on/off state and PWM for motor speed adjustment
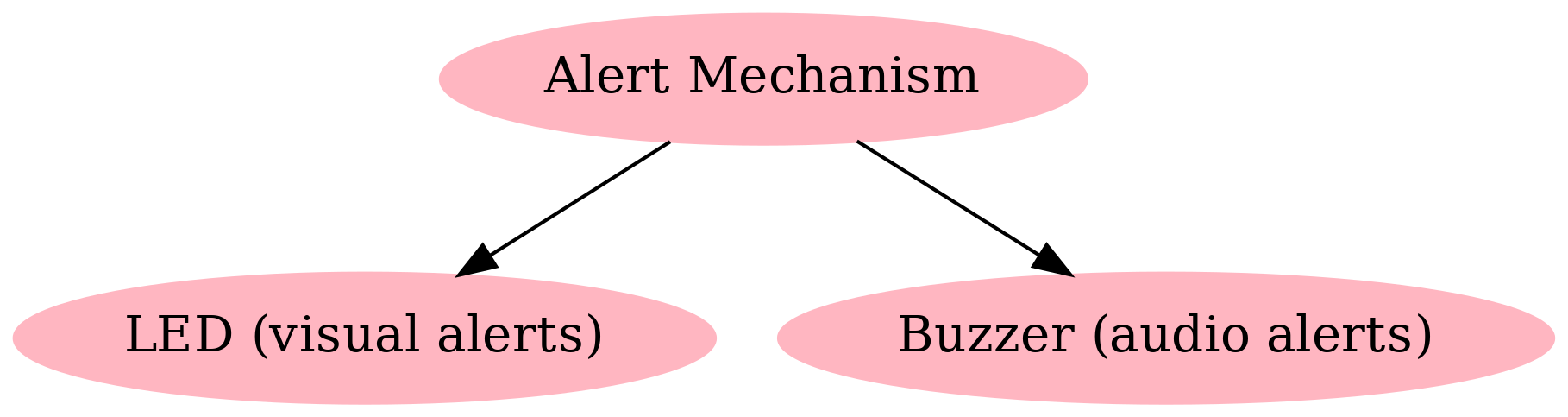
- Alert Mechanism: GPIO pin connected to an LED or buzzer to signal alerts.
- Power Supply: 3.3V or 5V from a dedicated power source (battery or onboard power system).
- Energy Consumption Monitoring: Tracks real-time power usage with energy consumption rates.
- Energy Consumption Rate: 100 units per time tick (arbitrary scale)
- Low Power Mode: The system enters low-power mode using the
WFI(Wait For Interrupt) instruction when no critical operations are required.
Hermetis' system is structured around several key subsystems working in tandem:
- GPIO Configuration: Configure the motor control pins and alert output.
- ADC Setup: Initialize ADC channels for reading sensor values (altitude and velocity sensors).
- Timer Configuration: Set up timers for real-time interrupts and timing events.
- Before launch, the system checks the status of the sensors and motors:
- If the altitude sensor reads out of the valid range (e.g., negative altitude or beyond the max threshold), an error is flagged.
- Motors are checked by reading specific GPIO output register bits to ensure they are in the correct state (not malfunctioning).
- If any hardware check fails, the system triggers an alert and enters a low-power state.
- Engine Activation: Motors are activated after a short stabilization delay.
- Launch Monitoring: The system continuously checks the altitude and velocity, adjusting the thrust based on sensor feedback.
- PID Control: Two separate PID loops—one for altitude and one for velocity—are used to continuously adjust motor power, ensuring that the rocket maintains the target altitude and velocity throughout flight.
- Stability Check: If instability is detected (e.g., overshooting altitude or velocity), the system will trigger an alert and adjust motor power to stabilize the rocket.
- Real-Time Adjustments: The system uses the PID control loop for real-time corrections to altitude and velocity.
- Altitude Control: Adjusts the engine power based on the difference between current and desired altitude.
- Velocity Control: Adjusts engine power to maintain target velocity based on sensor readings.
- Safety Mechanisms: If altitude or velocity exceeds safe operational thresholds (ALTITUDE_MAX = 10000m, VELOCITY_MAX = 2000m/s), the system will trigger an alert and enter a fail-safe mode.
- The system conserves energy when idle or after the launch sequence is completed by entering low-power mode.
- The system enters low-power mode using the
WFI(Wait For Interrupt) instruction, which halts CPU activity until an interrupt occurs (e.g., a sensor reading or a timer event).
- Altitude Sensor (e.g., MS5611):
- Measurement Range: 0 - 10000 meters
- Resolution: 0.01 meters
- Accuracy: ±1 meter
- Communication: I2C/SPI
- Velocity Sensor (e.g., GPS or Doppler radar):
- Measurement Range: 0 - 2000 m/s
- Accuracy: ±0.5 m/s
- Communication: UART or SPI
- PWM Output Range: 0 - 255 (8-bit control)
- Engine Power: Affects thrust; higher values correspond to more thrust
- GPIO Pin Control: Used for turning motors on or off
- Feedback: Continuous feedback loop from sensors to adjust motor output
- Real-Time Timer (TIM1): Provides interrupt-driven timing for precise control of events (e.g., sensor readings, PID loop updates).
- Timer Frequency: Set to ensure real-time monitoring of sensor data
- Interrupts: Hardware interrupts are used to minimize CPU usage during periods of inactivity (low-power mode) and to trigger responses when key events occur.
- Sensor Errors: If sensor data is invalid (e.g., out of range), the system triggers an alert.
- Motor Errors: If motor status indicates failure (e.g., motors not responding), an alert is triggered.
- Alert Mechanism: Can activate a buzzer or LED to signal a failure.
-
System Initialization:
- Initialize GPIO, ADC, and Timers.
- Set user-defined target altitude and velocity.
-
Hardware Integrity Check:
- Check if sensors (altitude and velocity) are operating within the valid ranges.
- Confirm motor status via GPIO pins to ensure readiness.
-
Launch Sequence:
- Activate engines and initiate countdown.
- Check and stabilize rocket parameters (altitude and velocity).
- Trigger PID control loops to continuously adjust engine power based on sensor feedback.
-
Flight Monitoring and Adjustment:
- Use PID loops to adjust thrust for altitude and velocity.
- Continuously monitor the sensors and adjust parameters as needed.
-
Safety and Alerts:
- Monitor for abnormal values (e.g., exceeding MAX altitude or velocity).
- If instability is detected, trigger alert and adjust system parameters.
-
Low Power Mode:
- After launch, the system can enter a low-power mode to conserve battery.
- Advanced Control Algorithms: Implement more advanced algorithms like adaptive PID or model-based predictive control.
- Expanded Sensor Suite: Integration of additional sensors such as gyroscopes, accelerometers, or magnetometers for enhanced flight stability.
- Remote Telemetry: Adding real-time telemetry data output for monitoring flight status remotely.
- Powerfull Diagnostics: Using machine learning techniques for detecting system anomalies and optimizing flight performance ?
- The diagrams were created using the
graphvizpython library.
If you need to contact me for any reason, please go to my contact page.
I would add to that that the space domain is a very complex domain and is not one of the skills that I have mastered, so although I have tried to provide explanations and an accurate code, I have very probably made a HUGE number of errors in the code, this projects and in the explanations. Nevertheless, this project has enabled me to learn more.